2. BRASH Groundsystem BRIDGE Demo
This page will take you through how to run a BRASH bridge that communicates with the cFS TO_Lab and CI_Lab applications.
It uses a number of ROS2 messages that have been automatically generated from cFS binaries, each with a dedicated topic.
This example provides a demonstration on how a ROS2 ecosystem running as part of a mission Ground System could communicate with a flight-side cFS instance.
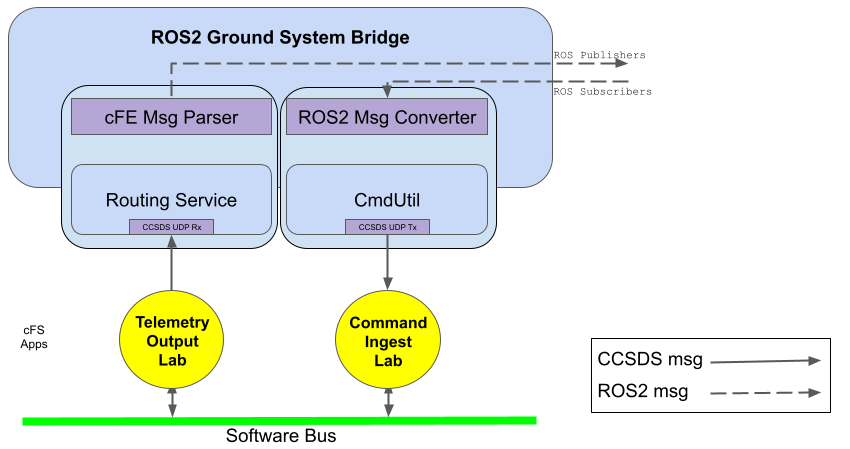
The basic architecture of this bridge looks like:
2.1. Start cFS
$ cd ~/code/cFS/build/exe/cpu1
$ ./core-cpu1 2>&1 | tee out.txt
2.2. Start the BRASH groundsystem bridge
$ cd ~/code/brash
$ . install/local_setup.bash
$ ros2 launch cfe_plugin cfe_bridge.launch.py
2.3. Use rQT to enable TO messages
In a new terminal start the
rQTUI.$ ros2 launch brash_application_tools groundsystem_demo.launch.py
Enable TO output by using the Message Publisher plugin to send a command message to the
/groundsystem/to_lab_enable_output_cmdtopic.
You will need to expand the
payloadfield in the UI and set thedest_ipthe approprate IP, probably'127.0.0.1'unless you have changed it inTO_LabandCI_Lab.Send the command by right clicking over the message in the Message Publisher window and selecting Publish Selected Once.
Warning
The step above is fundamental to get the data flowing to the ground! You’ll see in the terminal running
./core-cpu1a line showing that the request was received: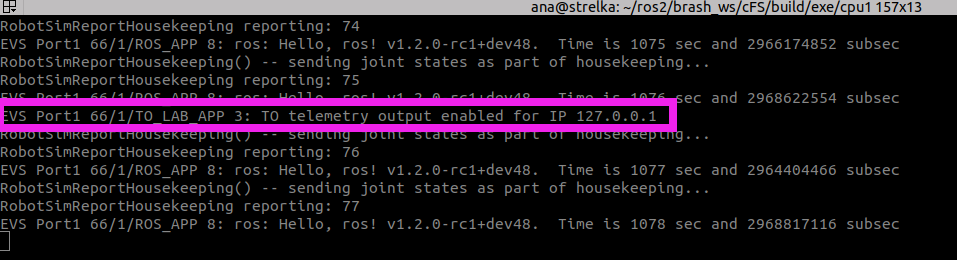
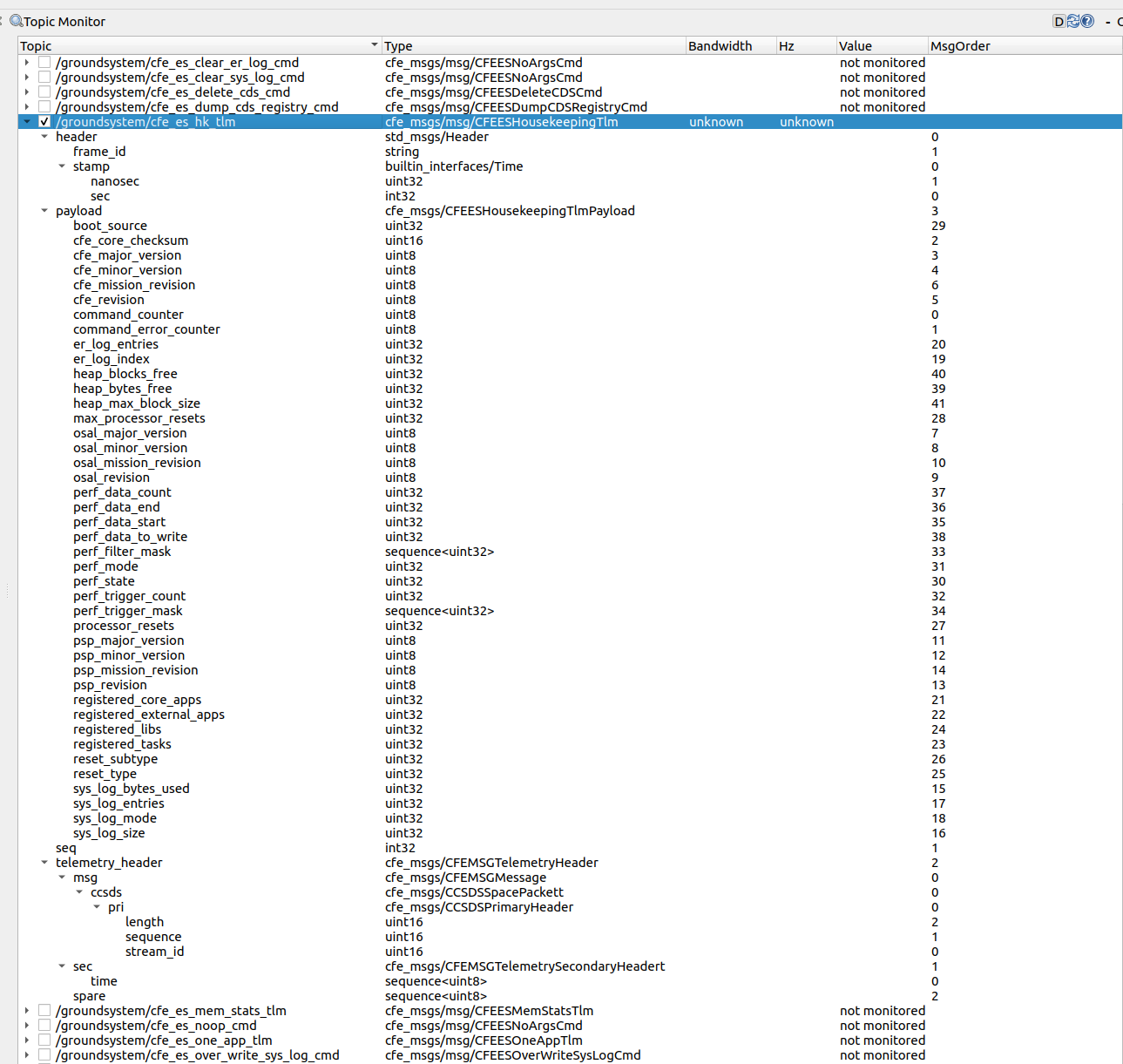
Check and expand the cFE ES Housekeeeping Telemetry topic
/groundsystem/cfe_es_hk_tlmin the Topic Monitor window. You should now see telemetry data coming from cFS and translated into a ROS2 message.